NEDO
ヒューマノイドロボットが行うスケートボードの技の紹介
NEDOの委託事業「人と共に進化する次世代人工知能に関する技術開発事業」(以下、本事業)において、株式会社国際電気通信基礎技術研究所(ATR)と国立大学法人京都大学、国立研究開発法人産業技術総合研究所(産総研)は、人と共に学びながら協働作業ができる人工知能(AI)搭載ヒューマノイドロボットの実現に向けて取り組んできました。このたび、ATRが開発中の「サイボーグAI」を搭載したヒューマノイドロボットが、人の運動のみまね学習をすることで、人並みの実時間運動性能を達成しました。
今後は、本事業の成果をベースに、人と共存する多様な環境での、ロボットによる安心・安全な運動を通じて、人に寄り添うような支援が可能となるヒューマノイドロボット、および、それを駆動するAI技術の研究を実施します。
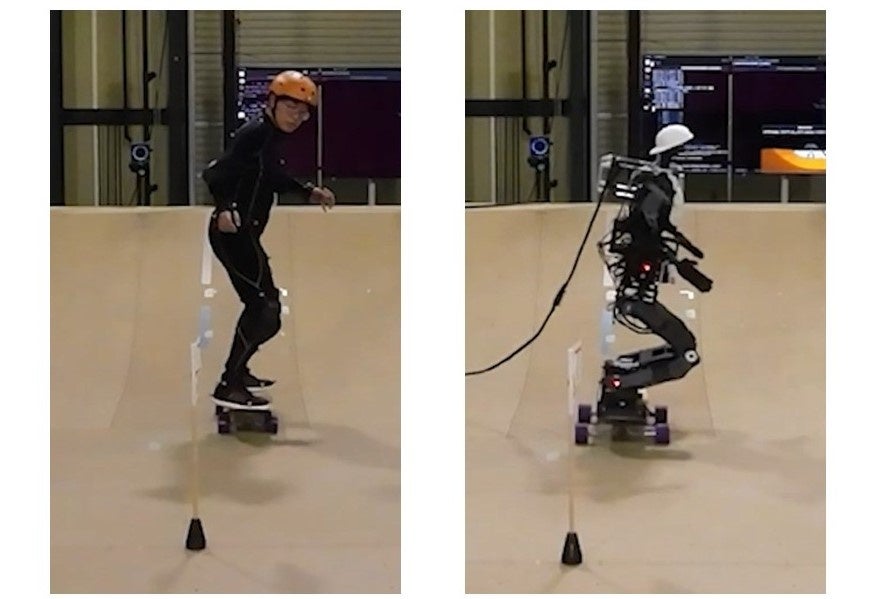
スラローム運動中のヒューマノイドロボットの動き(右)
1.背景
高齢化が進み、さまざまな要因により労働者人口が減少している現状の中、人と同程度の自由度を有するヒューマノイドロボットの安全かつ安心な利活用拡大は、喫緊の課題です。
現在、AIにより、ロボットの物体認識・把持の成功率は向上し、高い運動能力を持つロボットの制御技術に特化した仕組みも開発されており、ロボットの利用場面の拡大に大きく貢献しています。しかし、特殊なアクチュエータに頼ることなく民生用の安価なモーターを用い、自由度が高いロボットに、人の運動を「みまね」させて、実時間において俊敏な運動を実現できるロボット搭載用AIは、実現されていませんでした。
このような背景の下、NEDOは2020年度から本事業※1をATRに委託し、京都大学、産総研と共同で、人と同程度の俊敏な身体性で、人と協働作業が可能なヒューマノイドロボット搭載用AI「サイボーグAI」の基本技術の開発に取り組んできました。その一環として、人と同程度の身体性と実時間での意思決定能力(実時間運動性能)を定量的に評価するための実験環境「ロボットスケートパーク※2」の整備を進めてきました。
2.今回の成果
(1)人の運動の転移(みまね)学習により、人並みの実時間運動性能を達成
「サイボーグAI」を搭載したヒューマノイドロボットが、みまね学習により、曲率に変化があるような複雑な環境において、人並みの実時間運動性能を達成しました。人がスケートボード運動を行っている際の脳波・身体座標などの生体信号を計測し、並行して計算機上のサイバー空間において再現した後に、ヒューマノイドロボットに実装しています。
また、その過程において、これらの運動と脳活動の関連を評価しました。これまでの発表※3では、身体の重心(腰の位置)の上下動の「みまね」に限られていました。今回、上下方向だけでなく前後・左右方向(進行方向および進行方向と平面上で直交する方向)も含めた制御と、体軸が傾いた状態からの回復など、全身の身体制御の「みまね」ができるようになったことで、各種スケートボードトリックを実現しました。(紹介動画 https://bicr.atr.jp/bri/)
(2)スラローム運動
人(スケートボーダー)は、身体を前後(進行方向と直交する方向)に傾けることで、受動車輪を制御し、スケートボードの方向転換をします。特にスピードが出ていない状況で大きく傾けると転倒してしまいます。こうした身体の絶妙な3次元での全身の制御を、ヒューマノイドロボットは「みまね」することで人と同じように転倒せずに障害物をよけながら滑走できます。(紹介動画 https://bicr.atr.jp/bri/)
人とロボットは身長や重さが異なるため、身体を傾けたときのスケートボードの動きも異なります。そこでロボットはサイバー空間で人の運動のまね方を学習する際、単純にコピーするのではなく、身長や重さの違いを考慮してロボット自身にとって適切な動きに修正しながらまねをします。これにより、難易度の高い運動をまねる事ができるようになりました。また、サイバー空間でのヒューマノイドロボットの動きは、現実と同等になるように調整しており、素早い動作につなげることもできるようになりました。
3.今後の予定
NEDOとATRは、本事業で開発した基盤技術をベースに、介護・介助・リハビリや個別輸送・運搬など、労働集約性が高い場面において、人と同程度の自由度を有するロボットが人を代替したり、人との協働を可能にしたりする応用技術に展開することで、ロボットの利活用拡大に向けた取り組み※4を開始しました。
その取り組みを通じて、人並みの運動性・潜在状態(心的状態など)を有することで、人に寄り添いつつ、自律・協働を可能とするロボット用AI技術の実現により、人とロボットが共生できる社会を目指します。
【注釈】
※1 本事業
事業名:人と共に進化する次世代人工知能に関する技術開発事業/人と共に進化するAIシステムのフレームワーク開発/サイボーグAIに関する研究開発
事業期間:2020年度~2024年度
事業概要:人と共に進化する次世代人工知能に関する技術開発事業 https://www.nedo.go.jp/activities/ZZJP_100176.html
※2 ロボットスケートパーク
スケートボード実施時の人の脳波・筋電・モーションキャプチャといったデータの同時計測と、ヒューマノイドロボットによる学習実験を並行・連携して実施できる実験環境「ロボットスケートパーク」を、ATR敷地内(京都府精華町)のロボット実験棟(床面積486.92平方メートル、高さ7メートル)内部に構築しました。「ロボットスケートパーク」には、人やロボットのためのスケートボードランプ、人やロボットがスポーツをする際の安全設備、人やロボットの動きを計測するシステム、人の筋肉や脳の機能を同時計測可能とするワイヤレス計測システム、などが設置された人とロボット(ロボット搭載用AIを含む)のデータ収集、学習を同時に行える実験環境です。
※3 これまでの発表
(参考)NEDO、ATRによるニュースリリース「世界初の人・AI共進化実験環境「ロボットスケートパーク」を整備」(2024年3月12日)
【NEDOによるニュースリリース】https://www.nedo.go.jp/news/press/AA5_101726.html
【ATRによるプレスリリース】https://www.atr.jp/topics/press_240312.html
※4 ロボットの利活用拡大に向けた取り組み
事業名:NEDO先導研究プログラム/新産業・革新技術創出に向けた先導研究プログラム/サイボーグ生成AIの研究開
発
事業期間:2025年度~2026年度
事業概要:NEDO先導研究プログラム https://www.nedo.go.jp/activities/ZZJP_100100.html